简要介绍
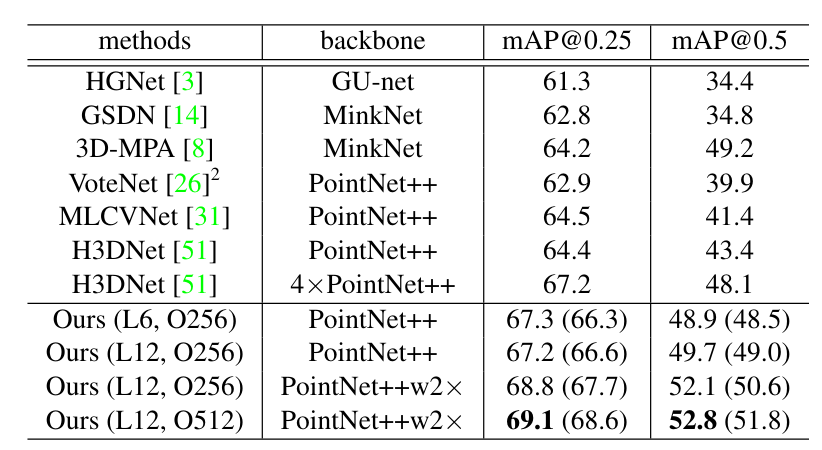
在 3D 检测里非常有代表性,完全抛弃 anchor/proposal,直接用 Transformer 做中心点预测和 box 回归。
是 anchor-free + Transformer 的里程碑方法。
纯粹基于点的方法 骨干网络可替换,这里使用 pointnet++
感觉是直接加了一个 Transformer 块(很像 pointTr 中的),直接预测除了框的参数
Scan Net V 2
RGB-D
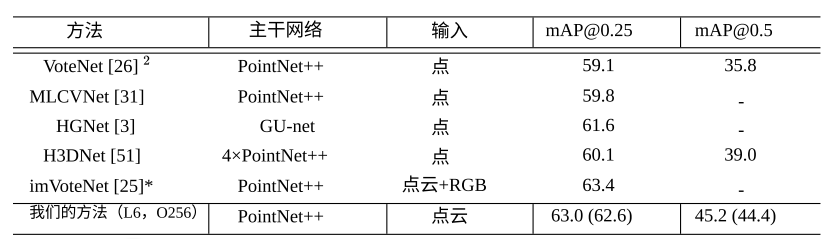
简要介绍
在 3D 检测里非常有代表性,完全抛弃 anchor/proposal,直接用 Transformer 做中心点预测和 box 回归。
是 anchor-free + Transformer 的里程碑方法。
纯粹基于点的方法 骨干网络可替换,这里使用 pointnet++
感觉是直接加了一个 Transformer 块(很像 pointTr 中的),直接预测除了框的参数